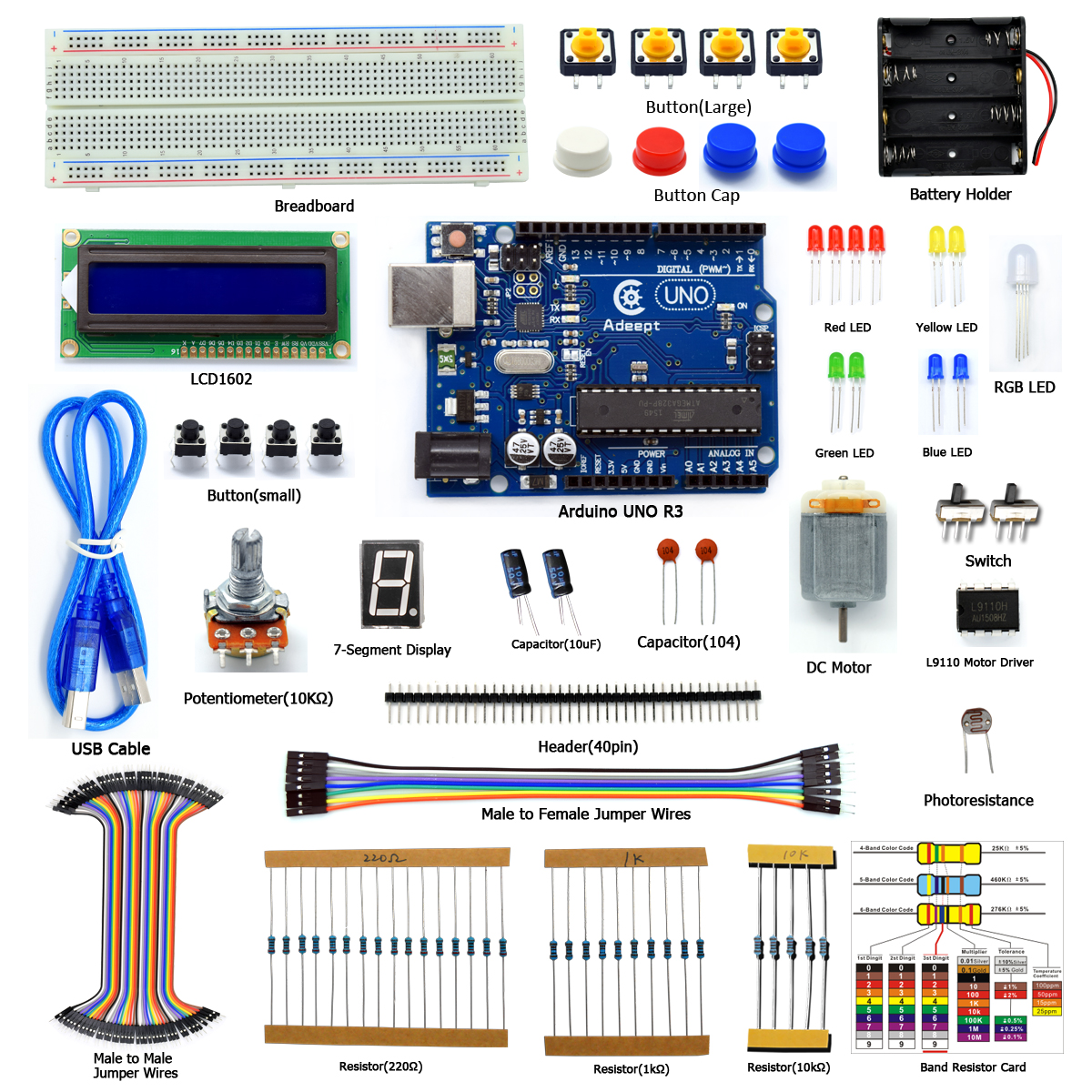
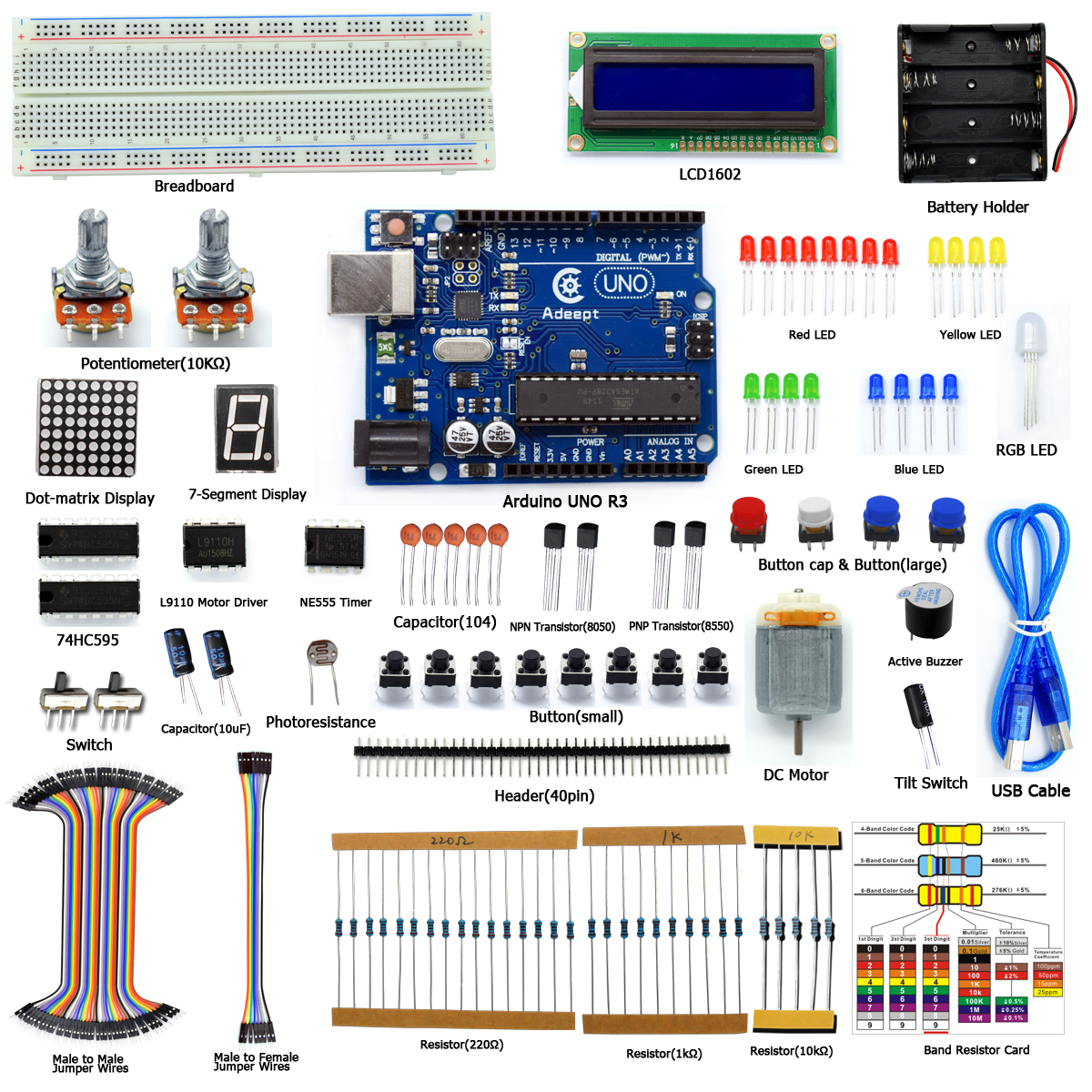
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](javascript:slideChange('mainImage', '/data/editor/webp/2025/06/05/e5231d2fO1CN01jxHIGn1qdIOqjLkWz_!!3161495518.jpg_.webp'); "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](javascript:slideChange('mainImage', '/data/editor/webp/2025/06/05/cb17aff5O1CN01cOWz8U1qdIOsEscxp_!!3161495518.jpg_.webp'); "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](javascript:slideChange('mainImage', '/data/editor/webp/2025/06/05/b3944a16O1CN01IT1qGk1qdIOtsew2r_!!3161495518.jpg_.webp'); "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](javascript:slideChange('mainImage', '/data/editor/webp/2025/06/05/c0bad72fO1CN01tmgdKd1qdIOvRMdzJ_!!3161495518.jpg_.webp'); "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")
-
 178,000원
178,000원
-
 2,000원
2,000원
-
 5,600원
5,600원
-
 21,000원
21,000원
-
 24,150원
24,150원
-
 26,140원
26,140원
-
 43,490원
43,490원
-
 15,000원
15,000원
-
 900원
900원
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](/data/editor/webp/2025/06/05/b99576e3O1CN01jxHIGn1qdIOqjLkWz_!!3161495518.jpg_.webp "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")
추천 상품
관련 상품
-
178,000원
ADR021 OLED 디스플레이 OpenCV 표적 추적 비디오 전송 기능이 있는 Adept Alter All-in-One 라즈베리 파이 스마트 로봇 자동차 키트 STEAM 로봇 키트 [Adeept-001]
-
2,000원
초음파 링 세척 웨이퍼 압전기 세라믹 칩 고성능 38mm [ZLA032-017]
-
5,600원
D2-8 및 비도어 스마트 트래킹 키트 교육 실습 및 제작 순찰차 DIY 벌크 TJ-56-635 [DIY-327]
-
21,000원
조정 가능한 CNC 스텝 다운 전압계 LCD 디스플레이 전원 공급 장치 모듈 DC WZ5005L 50V5A 250W [ZTI45-010]
-
24,150원
ADA001 가이드북과 C 코드가 포함된 Arduino용 Adept 스타터 키트 Arduino UNO R3 LCD1602 브레드보드 DC 모터 스타터/초급 키트 [Adeept-029]
-
26,140원
ADA002 Adept Super Starter Kit for Arduino UNO R3 LCD1602 브레드보드 DC 모터 스타터/초급 키트 (사용 설명서/가이드북 및 C 코드 포함) [Adeept-030]
-
43,490원
ADR010 튜토리얼 C 및 파이썬 코드 PDF 가이드북이 포함된 라즈베리 파이 3 2 B/B+ DS18b20 로봇 프로젝트 스타터 키트용 Adept 24 모듈 센서 키트 [Adeept-032]
-
15,000원
황화수소 가스용 상베이 S4H2S-100 공기질 센서 전기화학 H2S 가스 감지기 [SANGBAY-05]
-
900원
DC-DC 전압 안정화 전원 강압 모듈 입력 13V-24V 고정출력 12V [ZTA179-093]
-
 900원
DC-DC 전압 안정화 전원 강압 모듈 입력 10V-24V 고정출력 9V [ZTA179-092]
900원
DC-DC 전압 안정화 전원 강압 모듈 입력 10V-24V 고정출력 9V [ZTA179-092]
-
1 ADR021 OLED 디스플레이 OpenCV 표적 추적 비디오 전송 기능이 있는 Adept Alter All-in-One 라즈베리 파이 스마트 로봇 자동차 키트 STEAM 로봇 키트 [Adeept-001]
178,000 원 -
2 초음파 링 세척 웨이퍼 압전기 세라믹 칩 고성능 38mm [ZLA032-017]
2,000 원 -
3 D2-8 및 비도어 스마트 트래킹 키트 교육 실습 및 제작 순찰차 DIY 벌크 TJ-56-635 [DIY-327]
5,600 원 -
4 조정 가능한 CNC 스텝 다운 전압계 LCD 디스플레이 전원 공급 장치 모듈 DC WZ5005L 50V5A 250W [ZTI45-010]
21,000 원 -
5 ADA001 가이드북과 C 코드가 포함된 Arduino용 Adept 스타터 키트 Arduino UNO R3 LCD1602 브레드보드 DC 모터 스타터/초급 키트 [Adeept-029]
24,150 원






이미지 확대보기 D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](javascript:slideChange('magnifyImage .img_photo_big', '/data/editor/webp/2025/06/05/e5231d2fO1CN01jxHIGn1qdIOqjLkWz_!!3161495518.jpg_.webp'); "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](javascript:slideChange('magnifyImage .img_photo_big', '/data/editor/webp/2025/06/05/cb17aff5O1CN01cOWz8U1qdIOsEscxp_!!3161495518.jpg_.webp'); "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](javascript:slideChange('magnifyImage .img_photo_big', '/data/editor/webp/2025/06/05/b3944a16O1CN01IT1qGk1qdIOtsew2r_!!3161495518.jpg_.webp'); "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")
![D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]](javascript:slideChange('magnifyImage .img_photo_big', '/data/editor/webp/2025/06/05/c0bad72fO1CN01tmgdKd1qdIOvRMdzJ_!!3161495518.jpg_.webp'); "D2-3형 스마트 트래킹 트롤리 키트 51 싱글칩 스마트카 전자 DIY 벌크 TJ-56-90 [DIY-324]")

장바구니 담기
상품이 장바구니에 담겼습니다.
바로 확인하시겠습니까?
찜 리스트 담기
상품이 찜 리스트에 담겼습니다.
바로 확인하시겠습니까?







- 상호명 : 주식회사 오픈올
- 대표 : 김순복
- 사업자등록번호 : 782-87-01534
- 통신판매업신고번호 : 2022-인천미추홀-1772
- 전화 : 070-5029-4550
- 팩스 : 02-6499-9949
- 주소 : 인천광역시 미추홀구 주염로73번길 54 제이원플렉스 631호
- 개인정보관리자 : 김순복
- 메일 : openidea@openidea.co.kr
copyright (c) www.openidea.co.kr all rights reserved.